
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
Tags
- 비제차#제차해#일반해#적분인자#적분인자법#homogeneous sol#nonhomogeneous sol#integrating factor
- 선형 상수계수 미분방정식#lccode#sinusoidal input
- 변수분리#동차 미분방정식#완전 미분방정식
- 선형독립#기저벡터#선형확장#span#basis
- 부분 분수분해
- 베르누이 미분방정식
- 푸리에 급수
- 최소자승#least-square#목적함수#양한정#정점조건#최소조건
- 오일러-코시 미방#계수내림법
- 정규직교행렬
- 상태천이행렬#적분인자법#미정계수법#케일리-헤밀톤 정리
- linespectra#feurierseries#푸리에 급수
- 직교행렬#정규직교행렬#orthonormal#reflection matrix#dcm
- 여인수 행렬
- 내적 공간#적분
- 멱급수법
- 선형변환#contraction#expansions#shears#projections#reflection
- 여인자
- 선형시스템연산자#라이프니츠 법칙#fundamental theorem of algebra#erf
- 계수내림법#reduction of order#wronskian#론스키안#아벨항등식#abel's identity
- 2계미방#모드#mod#특성방정식#characteristic eq#제차해
- weighted least-squares
- 그람-슈미트 과정#gram-schmidt process
- 가중 최소제곱법
- reflection matrix
- 미분방정식 #선형 미분방정식 #상미분 방정식
- dirichlet
- 추정문제#normal equation#직교방정식#정사영#정사영행렬#정사영 변환
- 푸리에 정리
- 내적#duality#쌍대성#dot product
Archives
OnlyOne
MAF(Moving Average Filter) 본문
Control Engineering/Linear System and Signal
MAF(Moving Average Filter)
Taesan Kim 2024. 8. 24. 17:02MAF(Moving Average Filter)
MAF(Moving Average Filter)
Intro
이동평균필터는 노이즈를 누그러뜨리는 효과가 있다. 저주파 영역만 통과시키는 효과가 있으므로, Low-pass filter이라고 할 수 있다. 오늘은 주어진 데이타를 가져와 Matlab에서 MAF를 구현하는 작업을 할 것이다.
MAF
MAF는 버퍼에 들어가는 숫자들의 평균을 업로드하는 필터이다. 수학적 정의는 다음과 같다.

Matlab Simulation
다음과 같은 데이터 시트가 주어진다.
clc;clear all;close all;
Ts = 0.01;
time = 0:Ts:2*pi;
Niter = length(time);
s = sin(2*pi*time);
v = 0.1*randn(size(time));
u = s + v;
save sim_data.mat; clear all;
MAF를 구현하기 위한 Matlab코드는 다음과 같다.
%================================================
%Handong Global University
%------------------------------------------------
%Name: Taesan Kim
%ID: 22300203
%Create: 2024.08.19
%Modifire: 2024.08.19
%------------------------------------------------
% MAF simulation 001
%================================================
close all; clear all; clc;
load sim_data.mat;
N = 3;
%N개의 비어있는 버퍼 생성
buffer_n = zeros(N, 1);
function [y, buffer_n] = MAFilter(N, u, buffer_n, n)
x = 0;
for i = 1:N
if n-i+1 <= 0
x = x+ sin(2*pi*0.01*(n-i+1)) + 0.1*randn(size(0.01*(n-i+1)));
else
x = x + u(n - i+1);
end
end
y = x/N;
%버퍼의 마지막 값만 버리고 앞에 u(N)값을 넣는다.
%u(N)은 u의 가장 최근값
%buffer_n = [u(end); buffer_n(2:end)];
buffer_n = [u(N); buffer_n(1:end-1)];
end
for n=1:Niter
[y(n), buffer_n] = MAFilter(N, u, buffer_n, n);
end
plot(time, u, 'b', 'LineWidth', 1);hold on;
plot(time, y, 'r', 'LineWidth', 1);
xlabel('Time');
ylabel('Amplitude');
title('Original Signal vs. Filtered Output');
legend('Original', 'Filtered');
grid on;


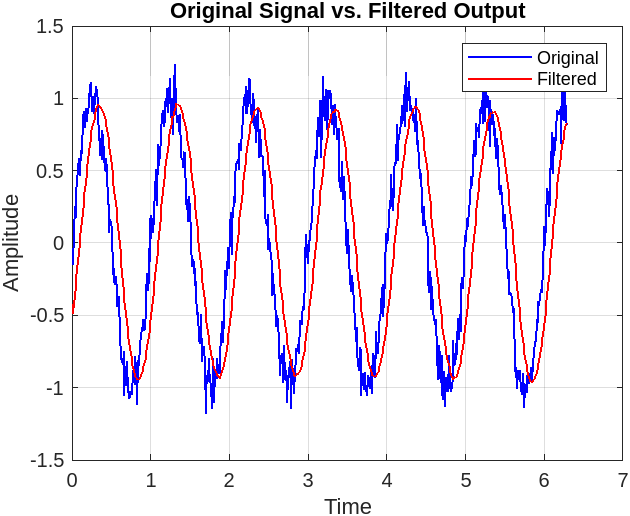
시뮬레이션 1 결론 : N값이 커질수록, 초기 버퍼에서 과거 메모리 부재로 인한 필터 지연 효과가 커진다. 반면에 N 값이 커질수록 신호가 더 많이 누그러진다는 것을 알 수 있다.
'Control Engineering > Linear System and Signal' 카테고리의 다른 글
| Impulse Train(comb/sampling function) (0) | 2024.08.26 |
|---|---|
| 깁스 현상(Gibb's phenomenon) (0) | 2024.08.25 |
| 푸리에 급수, Line Spectra(Feurier Series; Line Spectra) (0) | 2024.08.23 |
| 합성곱, 임펄스 응답(Convolution Theorem; Impulse Response) (0) | 2024.08.21 |
| 비선형 시스템의 선형화(Linearization of Nonlinear system) (0) | 2024.08.19 |
'Control Engineering/Linear System and Signal' Related Articles
more


